工業(yè)機器人詳解(二):機器人的主要技術(shù)參數(shù)
類別:自學(xué)教程日期:2018-05-31 11:22:37
對于需要購買機器人產(chǎn)品的用戶來說�,了解機器人的重要基本參數(shù)是非常重要的。因為只有了解了機器人的重要參數(shù)類型�,他們才能夠根據(jù)自己的需求選擇*為合適的機器人產(chǎn)品。為了幫助用戶更好的了解機器人的重要參數(shù)��,筆者從網(wǎng)絡(luò)資源中整理了一些介紹機器人重要參數(shù)的資料����,供用戶參考、學(xué)習(xí)�����。本文僅供交流����、學(xué)習(xí)使用,如果您是這些資料的作者�,認為這些資料觸犯了您的權(quán)益,可以聯(lián)系本站客服進行刪除��。
1. 自由度
我們一般常說的自由度,即機器人具有的獨立坐標軸運動的數(shù)目�。 機器人的自由度是指確定機器人手部在空間的位置和姿態(tài)時所需要的獨立運動參數(shù)的數(shù)目。手指的開�����、合��,以及手指關(guān)節(jié)的自由度一般不包括在內(nèi)�����。.機器人的自由度數(shù)一般等于關(guān)節(jié)數(shù)目��。 機器人常用的自由度數(shù)一般不超過5~6個�����。
2. 關(guān)節(jié)(Joint)
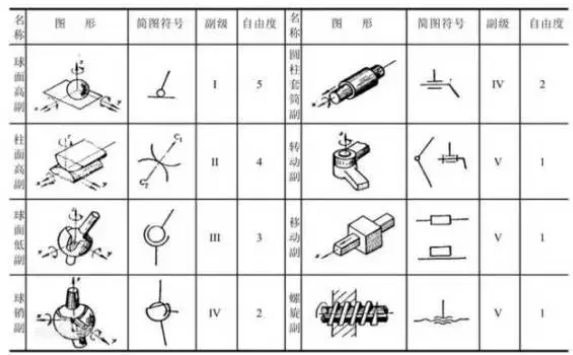
關(guān)節(jié)(Joint)即運動關(guān)節(jié)����,是一種允許機器人手臂各零件之間發(fā)生相對運動的機構(gòu)。
3. 工作范圍
機器人手臂或手部安裝點所能達到的所有空間區(qū)域��。其形狀取決于機器人的自由度數(shù)和各運動關(guān)節(jié)的類型與配置����。機器人的工作空間通常用圖解法和解析法兩種方法進行表示���。
4. 工作載荷
工作載荷,也可以稱之為機械負載��,是指機器人在工作范圍內(nèi)任何位置上所能承受的*大重量���,一般用質(zhì)量、力矩���、慣性矩表示����。還和運行速度和加速度大小方向有關(guān)�,一般規(guī)定高速運行時所能抓取的工件重量作為承載能力指標。
5. 工作速度
機器人的工作速度�����,即我們常說的機器人運動速度�����。一般指機器人在工作載荷條件下、勻速運動過程中�,機械接口中心或工具中心點在單位時間內(nèi)所移動的距離或轉(zhuǎn)動的角度。
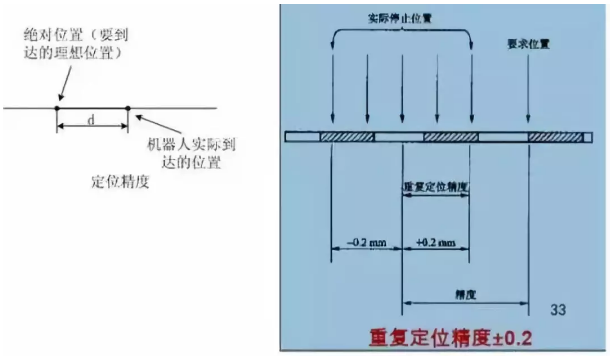
6. 精度
重復(fù)性或重復(fù)定位精度:指機器人重復(fù)到達某一目標位置的差異程度��?;蛟谙嗤奈恢弥噶钕拢瑱C器人連 續(xù)重復(fù)若干次其位置的分散情況�����。它是衡量一列誤差值的密集程度���,即重復(fù)度�����。
- 在線客服
- 服務(wù)熱線
- 微信咨詢
- 返回頂部